5本腕と6本腕のオオ クモヒトデは「ふく らみ方 」が違う ~からだの形が,動きを協調させるデザイン~
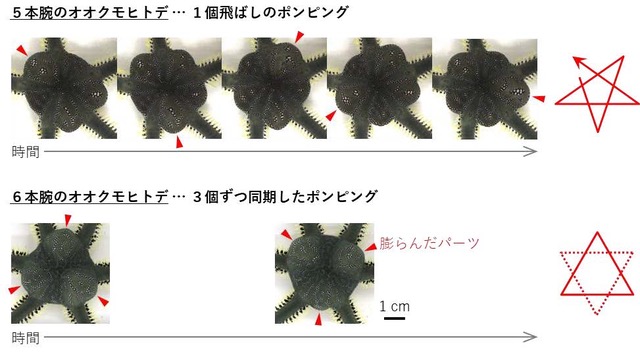
北海道大学大学院生命科学院博士課程の脇田大輝氏,広島大学大学院理学院の早瀬友美乃研究員,北海道大学電子科学研究所の青沼仁志准教授の研究グループは,オオクモヒトデというヒトデに似た動物が,からだを風船のようにしぼませたり膨らませたりする協調運動「ポンピング」をし,パーツ間の同期のパターンが5本腕と6本腕の個体で異なることを発見しました。
ポンピングは「生きた動物で,明らかに異なるからだの形が,明らかに異なる動きの協調を作っている」好例です。動物の動きを協調させるネットワークとして,神経回路が注目されてきましたが,研究グループはパーツ間に神経系を想定せず,水流のはたらきでポンピングの協調運動が成り立つことを,数式を使って説明することに成功しました。
本研究は,「からだの形そのものをうまく利用して,ある動きを協調させる」という動物の知恵をピックアップした研究で,複雑なコントロールなしに協調的なリズムを生み出す設計論として,ロボット工学への貢献が期待されます。
なお,本研究成果は,2019年6月5日(水)公開のScientific Reports誌に掲載されました。
(研究論文)
論文名 Different Synchrony in Rhythmic Movement Caused by Morphological Difference between Five-and Six-armed Brittle Stars(クモヒトデの5腕と6腕の形態差がもたらす,リズミックな運動の異なる同期性)
著者名 脇田大輝1,早瀬友美乃2,青沼仁志3(1北海道大学大学院生命科学院,2広島大学大学院理学院,3北海道大学電子科学研究所)
雑誌名 Scientific Reports(自然科学の総合誌)
DOI 10.1038/s41598-019-44808-w
公表日 2019年6月5日(水)(オンライン公開)
| 2019/6/12 プレスリリース |  |